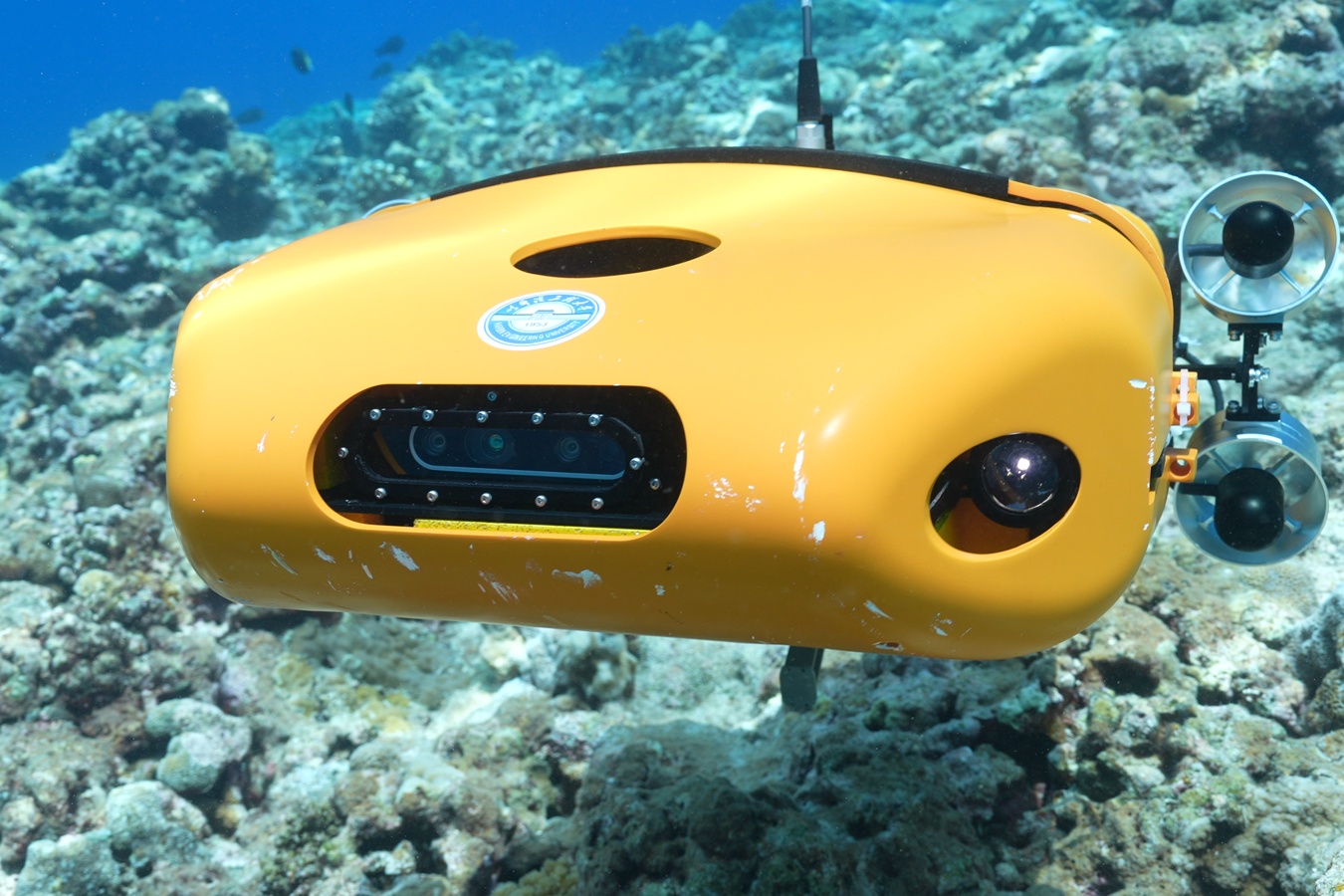
最近,在南中国海灯的早晨,这是一个水下机器人,直径近70厘米,带有优雅的拱门向泥土浸入泥土。这是与哈尔滨工程大学货运与工程学院的王帮团队开发的与米德里水下“乌龟”机器人合作的真实场景。它不仅在近谷环境中的观测中取得了厘米水平的突破,而且还撤销了传统水下机器人的“笨拙”和“艰难”的刻板印象。它开启了一个更准确,高效和环保水下的新季节。 “我们发现,海龟的推进方法倾斜并击败了前肢,不仅减少了水障碍,而且还保持了良好的推进。”团队成员Liu Ka记得,在无数失败之后,团队捕获了低瘫痪的机器人性能,推进器布局和机器人的应用程序之间的数学公式耳朵参数可极大地改善在机器人导航,推进器的布局和机器人的布局,推进器的布局,机器人外观的布局以及推进器的参数以及推进器和推进器的参数以及推进器和推进器的pameters和pameters的参数之间的数学公式。与研究和开发效率进行比较,“乌龟”机器人在导航过程中几乎没有涟漪,以及特定的排列推进器。沉积物干扰减少了90%,以允许机器人确定立即理解,以确保在下方航行时不会降低任何人。该团队建议“三点惯性测量方法”将机器人数据噪声降低约76.2%,从而将响应时间缩短了1.1倍。对照的稳定性增加了7.16倍。在进行了正在进行的研发之后,团队成功地引入了强迫跟踪算法的算法。机器人的敏捷性大大提高了机器人的敏捷性。 “乌龟”机器人的灵活运动通过在复杂的水下土壤中的全域车内操纵下的技术瓶颈成功破坏了。它不仅可以观察珊瑚,而且在水下捕鱼,发现和救援方面也起着重要作用。

